braccio robotico
ca 2005 - ca 2005
Il manipulandum aptico è costituito da un braccio robotico (MOOG FCS hapticMaster) che permette di controllare attivamente il movimento dell’effettore usato dal soggetto (normalmente il braccio) e di registrare passivamente il movimento con grande precisione. Il braccio robotico è programmabile in MatLab
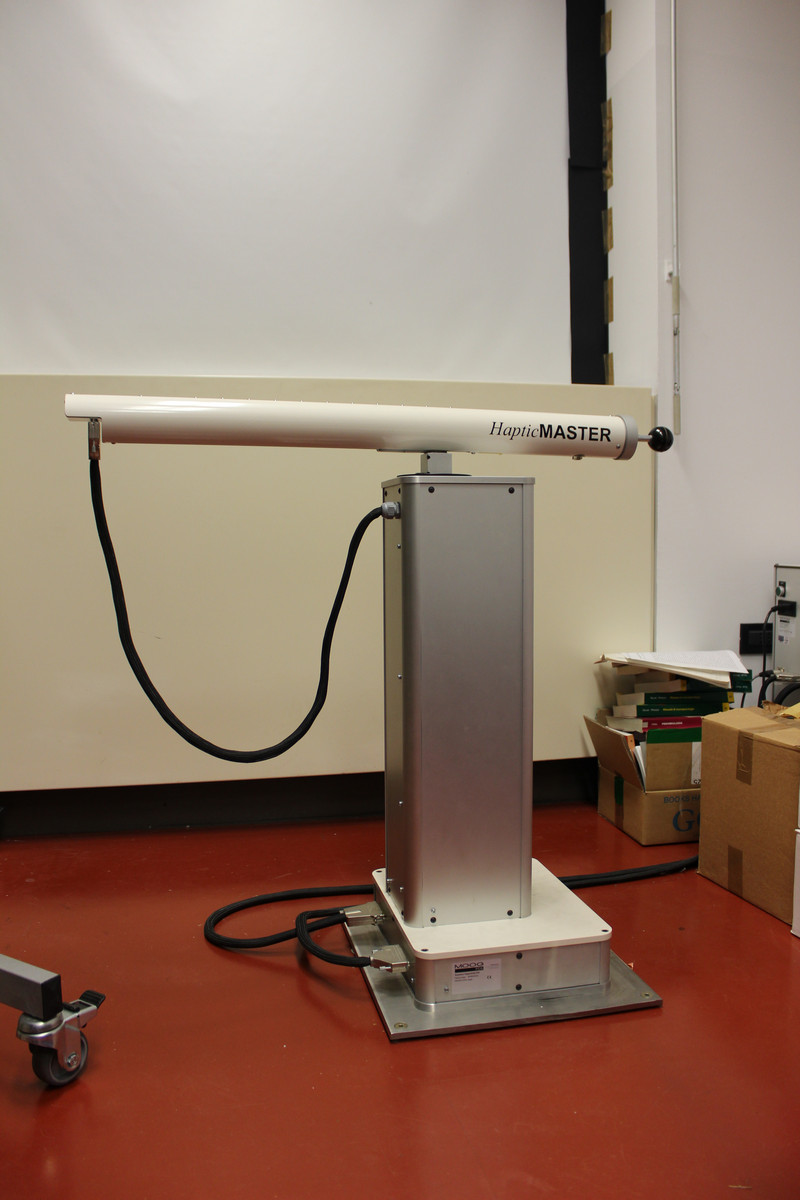
- OGGETTO braccio robotico
-
MISURE
Altezza: 90 cm
: 100 cm
- LUOGO DI CONSERVAZIONE Aspi - Dipartimento di Psicologia
- LOCALIZZAZIONE Università degli Studi di Milano-Bicocca
- INDIRIZZO Piazza dell'Ateneo Nuovo, 1, Milano (MI)
- TIPOLOGIA SCHEDA Patrimonio scientifico e tecnologico
-
CONDIZIONE GIURIDICA
proprietà Ente pubblico non territoriale
- CODICE DI CATALOGO NAZIONALE 0303272292
- ENTE COMPETENTE PER LA TUTELA Soprintendenza Archeologia, belle arti e paesaggio per la citta' metropolitana di Milano
- ENTE SCHEDATORE Università degli Studi di Milano-Bicocca
- DATA DI COMPILAZIONE 2022
- LICENZA METADATI CC-BY 4.0
ALTRE OPERE DELLO STESSO PERIODO - ca 2005 - ca 2005
ALTRE OPERE DELLA STESSA CITTA'
condividi



